|
|
本帖最后由 yhn567 于 2014-6-3 13:04 编辑 8 _5 I; W! Y0 Q+ h- K* p$ b
6 a9 h* ]6 n3 q4 r1 K! p
声明:本做法只了考虑基圆以上的齿廓曲面,(齿根过渡曲线好复杂)。) k0 d7 h2 I" E8 E- R
* a1 t! a! l( x, A
机械原理书上是这么说的,一条平面沿基圆柱面纯滚动,此平面内一条斜线扫过的空间轨迹形成了基齿廓曲面。
; f; c- |$ S# @+ ]1 r
6 e K0 y, x1 [下边这张图说明了一切:
0 F* p! k5 L0 u1 |. E# M
! v6 v( w7 H0 Y7 D8 a
" u9 Y) h e) t4 T所以,我们用三维软件画齿轮所要做的就是尽力精确控制这个面,因为建好这个以后另一个面的就是一些坐标变换问题了,而其余4个面是两个柱面加两个平面不是。
- g# D3 M; i4 R! q1 z7 }. l
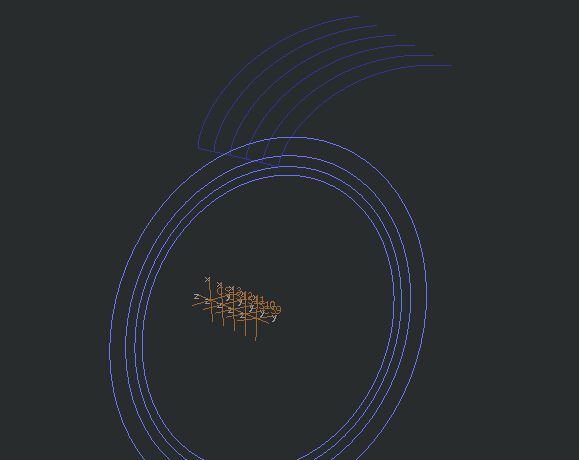
+ w) ~1 a2 G% X( y: T0 F( L( D1.所以,先来个螺旋线,(用极坐标方程很简单的,懒的想就查下~)像这样:; G. i1 f3 n' T+ e! [) N p( A
. Q# y4 ?6 X, S9 g9 n4 e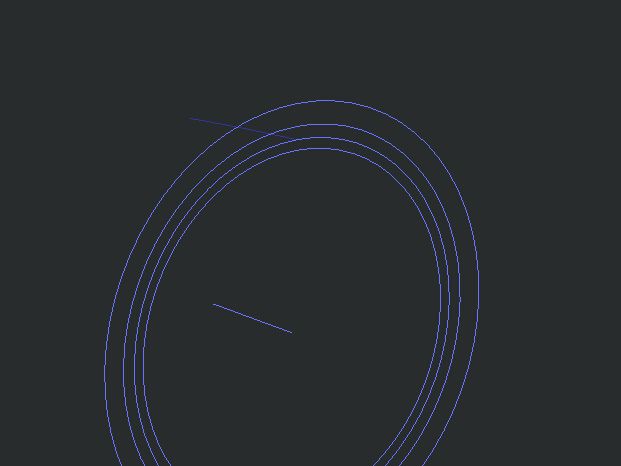
+ m8 N) I+ b4 x/ E
0 E8 R4 n) \9 i& L2 @! r E2.然后把螺旋线上的渐开线一条条加上,(知道螺旋线极坐标方程,很容易知道坐标变换的角度,我是先把螺旋线等分成6份,依次加坐标系,再旋转螺旋线要求的角度)像这样:9 z" L. |9 a, F6 L w/ }
/ R+ n2 {1 T4 f3 B! k) B1 v+ O6 i
3 _, Q& }0 @9 C1 v: G& y. M/ d
; Z# B" E) K: S" x3.再下来是做那条斜线(就是第一张原理图里边的),它只是平面内的一条斜线,而且手动坐标变换后方程也很简单,原理如下图:4 `* ]. `; A( V8 N4 ?: k0 _
; F6 J: a4 V0 |/ k7 l/ O( w, w- r

" N. f$ Z& |" B: O6 B7 _- b+ |0 J! S, ]% E$ j
4.然后多来几下,坐标变换还是要认真些的。( Y9 Q5 J! P$ b T
( f |4 a' u; C, {# q9 O- b
 ' V# Q9 ^" n, X3 E+ s ' V# Q9 ^" n, X3 E+ s
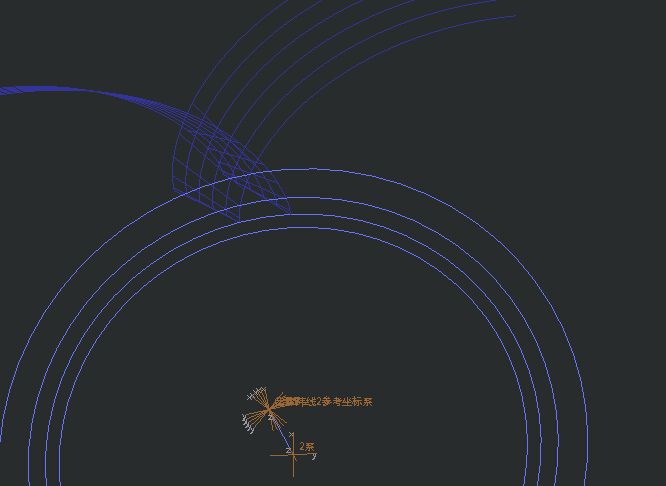
. N# G" y# ?5 f5.好了,就应该就是按书上说的基圆以上齿廓了。有点像微分的感觉,线动成面一下:
* G* d, m( ~7 J7 `- E
1 L' y: Q3 {" J( U3 Q) a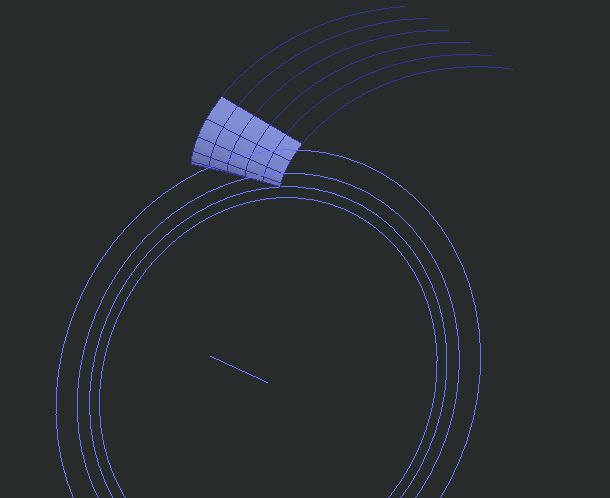 7 {+ e l7 ^7 P 7 {+ e l7 ^7 P
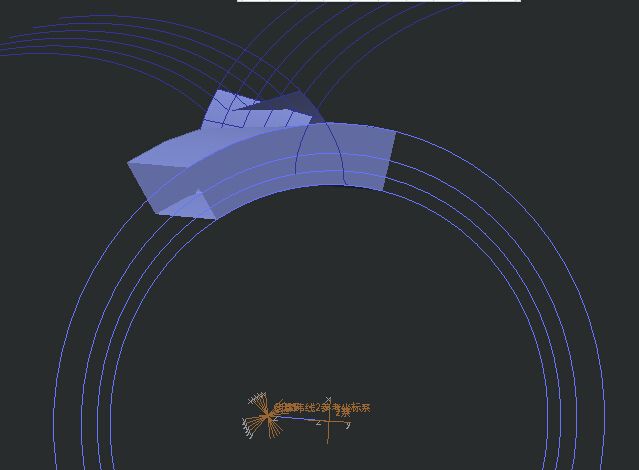
8 t# i. _. z* D6.坐标变换一个基圆上的齿厚,接着干:1 d/ }8 K8 f1 ?( {
. b$ ^% p) U: I2 y: J/ K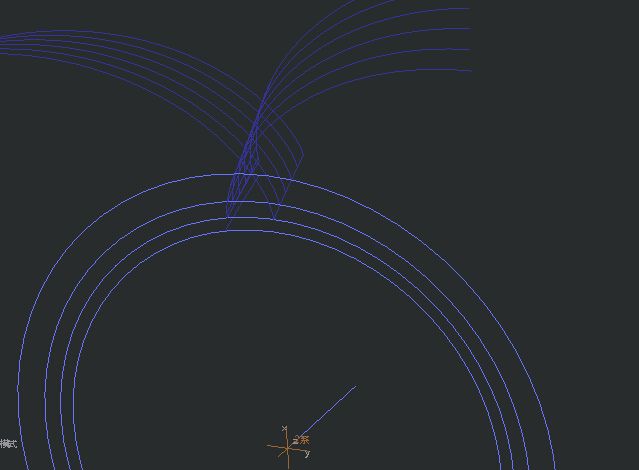
! d; k9 s' o3 e* L& F* g' M/ e T$ d0 O5 l" h+ a
, a& z0 n p7 a" ]. K% _4 }
1 o/ K1 @6 `: t9 [" B7.然后把面搞出来如下:3 V; Z2 Q/ }6 b3 D
; h# v* ~0 ]9 C8 @5 d4 b( \
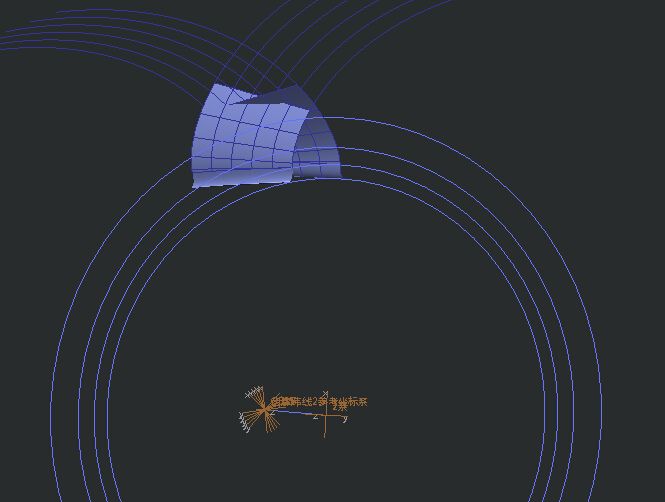
- U& \3 S- C8 B3 O; S' X N" h, }$ {# n7 q: z% D* v6 l
PS:齿根就先倒了个角吧,其实肯定不是一个简单的圆角# A7 Q! c/ P# d5 V0 w( m7 g# W
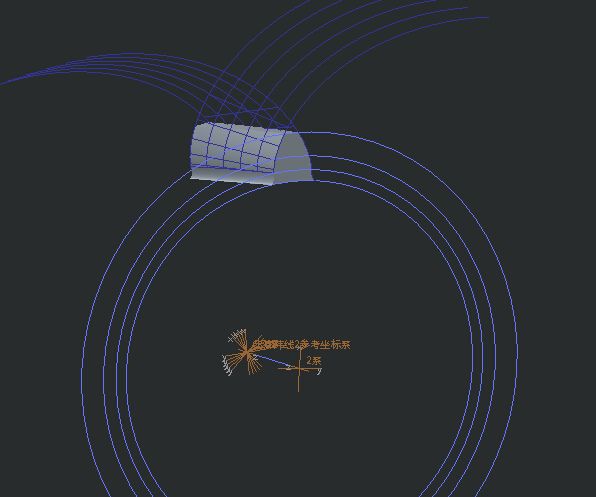
% n9 l/ G/ J' B8.然后把柱面平面也做了,一个旋转而已:: f% T# n( x: [$ m3 r
$ ^/ |4 ~& F$ F( y
 8 b7 Y) S6 T! R8 r3 m2 I' B 8 b7 Y) S6 T! R8 r3 m2 I' B
* f$ z) ~1 j. ~( b1 Z
9.然后合并实体化:% d# l8 X+ i5 ]2 a
5 p- H4 Q# i4 R' ~0 { r+ A
 9 ^8 \* x7 s; ~ 9 ^8 \* x7 s; ~
# c) W; \. E3 [$ P2 G
然后阵列下补全就成了,说想来思路挺简单的,就根据那个原理,但做起来还是有点烦琐的。1 X7 ^% b1 b( J' t# r2 ^3 ?
% l3 A- `1 ? E4 g) {3 q, [
以上。9 ^3 t2 ^8 g7 k2 w* g
- _5 `. k% A/ P s. d1 ?/ x
引:齿轮博大精深,学习永无止境。
+ |+ I6 f0 V% l- ^% t
5 v" T" u! z+ F; r+ C" ?% L" c这只是原理而已,还没算侧隙,修鼓等等。。。
3 U2 n f9 A- s h& k+ \- t6 Y# o ? D( H
7 A3 y/ \3 o# H1 ]
|
|

 发表于 2014-6-3 12:59:41
发表于 2014-6-3 12:59:41