本帖最后由 PB05009026 于 2014-4-4 17:23 编辑 4 p Y3 r. X: S: G' k" `2 O. e' D
$ m/ G: X9 k0 j) O( YFesto仿生袋鼠——原生高效的跳跃运动学 Festo的仿生袋鼠在技术上实现了袋鼠的运动方式。在每次跳跃的时候能够恢复和存储能量,用来作下一次跳跃,就跟真实的袋鼠一样。
( w& o% \: A) S' I3 x独特运动方式的技术实现 在仿生袋鼠的上,Festo综合利用了气动和电动驱动技术来完成这个高动态系统的设计。稳定的跳跃运动学加上精确的控制技术使得袋鼠在跳跃和落地过程中都很稳定。轻量结构设计使得实现这种独特的跳跃变为可能。整个系统还是由手势控制的。 " W0 X4 [- E2 W% u
移动式随身能源供应 Festo在仿生袋鼠的移动能源供应上极其重视。为了实现移动式供能,设计团队提出了两个思路——一种是集成式压缩机,一种思路是装高压储气装置。 1 [0 f# M6 {$ E
 5 Y" U8 E7 k7 E9 a+ _* v7 [6 E
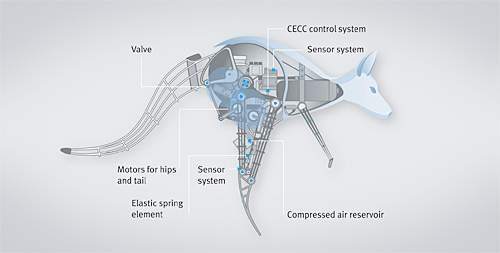
图1. 5 Y" U8 E7 k7 E9 a+ _* v7 [6 E
图1. 完整的高复杂系统概览:集成式驱动,控制技术和移动式能源供应 6 e8 I) r5 ? d5 b% @
 2 [7 R/ j) {; i9 L 2 [7 R/ j) {; i9 L
图2. 上帝的版本:袋鼠和它独特的构造 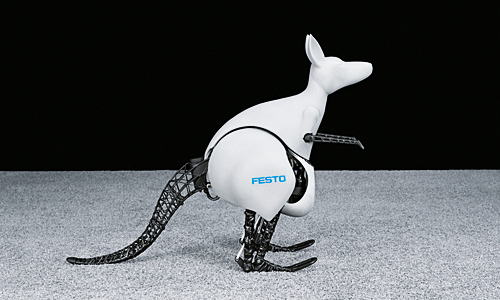 S# w4 k" t2 f. |7 \ S# w4 k" t2 f. |7 \
图3. 人类的仿生版本:仿生袋鼠的技术实现 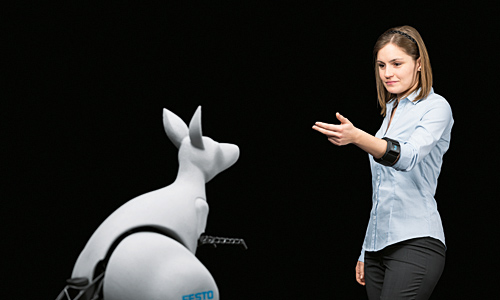 " N- l% i+ P# I# f
" N- l% i+ P# I# f图4. 简单的操控:用臂环实现手势控制 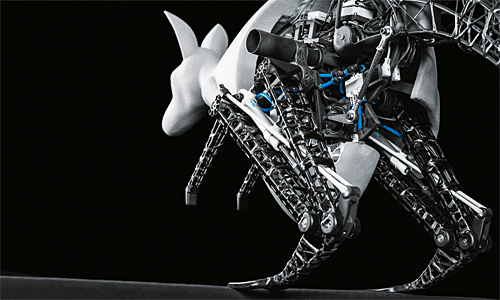 / |6 L) P8 P6 q* q$ G1 L0 d / |6 L) P8 P6 q* q$ G1 L0 d
图5. 优化排布设计:功能模块在有限空间内的集成 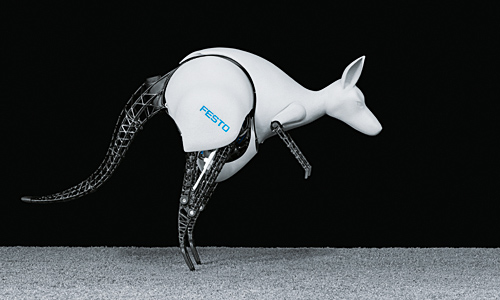 & p' ]' _/ D5 x/ b7 @ & p' ]' _/ D5 x/ b7 @
图6. 动态起跳:气动驱动技术可以提供强大的跳跃能量 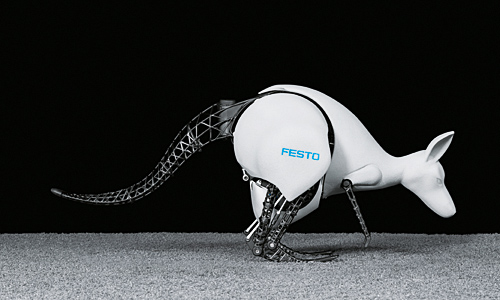 - _0 w2 W- @+ H2 q v- w2 F2 T# a
- _0 w2 W- @+ H2 q v- w2 F2 T# a图7. 高效的着落:为下一次跳跃存储能量 ( U# s2 O# a Z4 b$ ^* b% D
| 
 发表于 2014-4-4 17:08:57
发表于 2014-4-4 17:08:57
