|
|
服务机器人的核心问题在于自主定位与导航,它主要包括几大问题:: `2 x" F3 D5 x' k0 Z5 t
无需用户干预,机器人自主构建环境地图? 实时、高精度的获取机器人所在位置? 有效规避环境障碍,抵达目标地点? 在未知环境中,有效规划两地之间最短路线? 有了相应解决方案后,对于服务机器人厂商,还需要考虑如何快速与现有系统整合,加快产品上市?在高性能与低成本间如何获得平衡?8 E( v5 U1 d; s% r0 g- F
六大问题,一个对策 SLAMWARE系统就够了 SLAMWARE系统由高性能激光雷达RPLIDAR与定位控制引擎核心SLAMWARE Core构成。
7 s% v2 d0 _0 N) B2 u# k9 iSLAMWARE直接与RPLIDAR连接,并通过Control Bus与底盘连接。其中,High Speed Bus是一个高速的100M以太网,负责与人机交互系统连接,并传输地图数据。
2 C( p' j) k/ m6 ?, v: GSLAMWARE Core还支持超声波传感器、防跌落传感器、碰撞传感器和深度摄像头的数据,将它们和激光雷达的数据融合在一起,利用信息融合,使机器人实现更加智能、实用的自主运动。
( ^5 z/ Y7 l" K5 F& x- c看够了枯燥的文字说明和产品图片,拜托能不能拿点实际应用案例出来啊?
, F G+ n3 W9 k1 w% B3 L今天,我们就来举个栗子。; K! I2 i6 e1 r* W
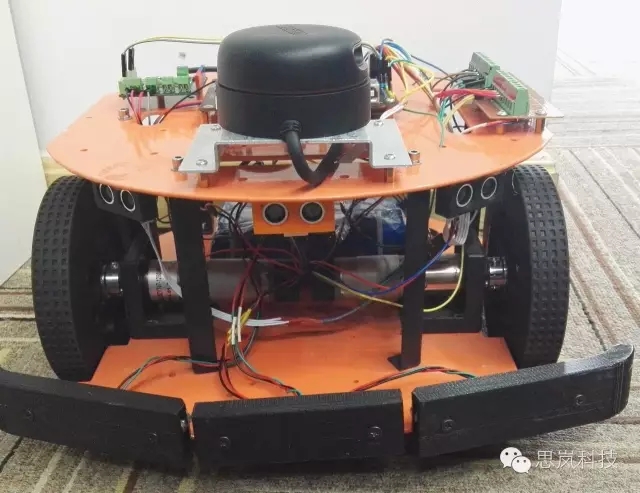
这是DFrobot推出的HCR家用机器人开源项目平台。
) P% x$ t4 O9 V这是一款双轮驱动的移动平台,其底盘前部配有一个牛眼万向轮,并配有碰撞传感器,可以作为在紧急刹车的触发装置。
) O" j" D# _% A/ G7 W9 D作为面向教育、科研和爱好者们的开源平台,HCR拥有丰富的传感器接口,方便用户快速搭建原型,验证设计思路。
1 P% p- z. V9 v6 X0 K4 e t那么,问题来了~# w1 [: U) V. F
想把HCR变成一个可自主移动的机器人小车需要几步呢?
/ y5 B. \$ J% ]3 v这和把大象装进冰箱一样,需要三步。
9 R2 x [1 Y- e第一步,安装RPLIDAR。
. P& |7 d2 E+ R$ @: D第二步,安装SLAMWARE。) i* t9 f1 u/ a$ [
第三步,打开手机APP,想怎么玩就怎么玩。
! W& s6 M1 l0 G, L0 s当然,肯定没这么简单,今天小编就带你看看如何基于HCR平台搭载SLAMWARE自动导航系统。: \& C' D" \0 k/ F( D
1、系统组成9 p% w% d# ]& J( g# V' L8 R
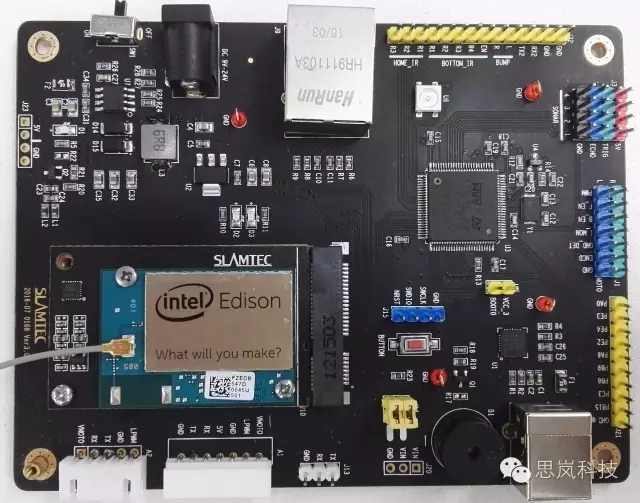
Slamware board Version 3.0
; F0 h1 c# E3 S) v; @RPLIDAR A2 `$ I1 R2 O Y% x% v
DFrobot机器人平台(包含碰撞传感器*3, 超声传感器*3, 2-wheel直流减速电机)3 o7 r/ ~1 [) k) |
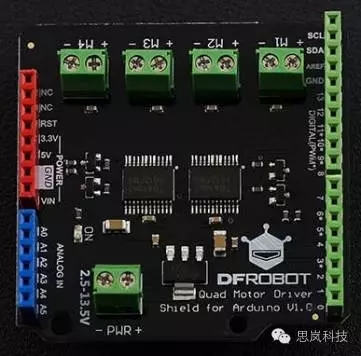
电机驱动板
! N. X$ G/ `% Y; z1 _, g大电流锂聚合电池( A1 m7 }: @; m4 |: t* H+ `9 w
杜邦线若干,VCC, GND 扩展版(自制)一块" r' i/ r* ^. p' h8 @2 J
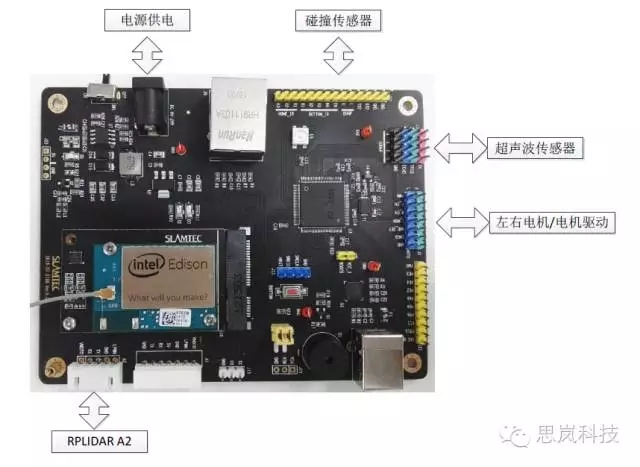
2、结构图/ X8 E9 ?0 }. g) U
硬件平台搭建
* z* \! v! |% {' J, @4 x9 P h(1)搭建好HCR平台(包含左右电机, 碰撞传感器, 超声波传感器),搭建HCR平台的最下面两层即可。
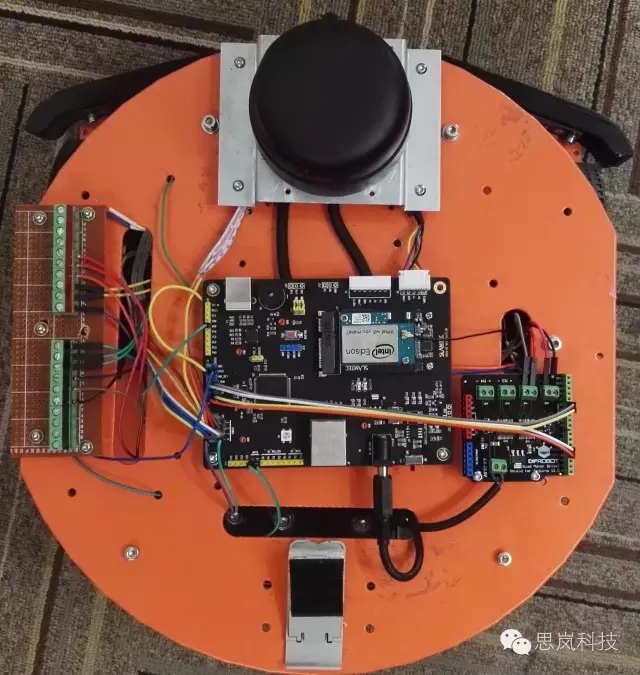
9 j! V0 B+ w$ l1 |" O+ W(2)固定Slamware board V3, 电机驱动板, RPLIDAR A2(连线方向为小车前进方向,注意不要装反), 锂电池(固定在底盘的最下面一层), 5V电源/GND扩展板(下图左侧)。如图示:
, }" T' s! Y, w2 L' s6 a% o(3)连线:
v) m5 o% ]1 D+ Ra.RPLIDAR: 按照上述结构图将RPLIDAR A2 插入板上A2插口;& W. N; ^) i3 s9 S* G. }' p9 h
b.Sonar:至多支持8个超声波传感器(本次安装左中右三个),分别插在板上J3位置的Sonar插口的1、2、3位置。超声传感器共有GND、Trig、ECHO、VCC四个引脚,分别和板上的这四个引脚相连即可;) m, }9 p I9 j+ O9 p4 M
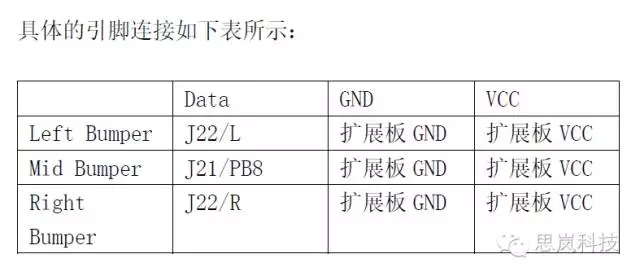
c.Bumper: 至多支持8个碰撞传感器(本次同样安装左中右三个),碰撞传感器的三个引脚分别为VCC、DATA、GND,V3板上的J22区域目前只有左右两个Bumper的数据接口,可以将中间Bumper的数据引脚接到GPIO上面;
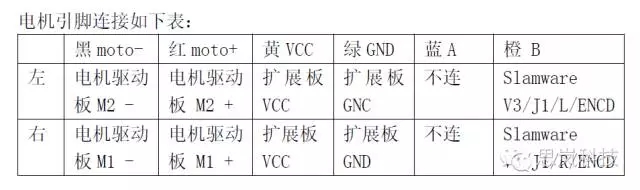
# g. L% z3 c! X1 Jd.电机驱动板/左右电机: : L. o% r( n2 G8 D8 b
硬件平台搭建完毕之后,我们离可自动导航的HCR平台又近了一步,下周我们会继续介绍如何进行固件代码配置。
1 u; y" j. b* C9 t" D. M4 v+ d8 z; X
) y6 S+ L, h0 |7 ^2 O* f |
|

 发表于 2017-1-25 10:35:16
发表于 2017-1-25 10:35:16