|
工业机器人不像人形机器人,结构比较简单,但核心部件的技术壁垒非常高。 & B" A t; i- r9 ~1 k6 H
其工作原理,简单来说,即模仿控制决策能力、思维方式和各种肢体动作。 ; b. R |3 W; N5 I
为了达到这一目标,可以通过四种方式: ) t5 D8 G# S$ s7 n. W! F
自主控制:要求机器人在复杂的非结构环境中,具备自主决策和识别环境的能力,即具备人类的某些智能行为。 ' m* k2 P9 |* ]' _. [2 B
遥控控制:由专人无线或有线遥控,在人类难以驻留的危险场所完成特定任务。如化学污染环境、军用、防爆排险机器人等。 5 d" P9 D) A3 F# I* ]/ d
可编程控制:实现根据机器人的工作任务和运动轨迹,编制控制程序,再将程序输入到控制器,机器人按照程序规定动作一步一步完成。若任务变更,只需修改或重新编写控制程序,较为灵活方便。 7 z! R: _( ~) N3 H4 R
示教再现:通过人手把手或示教盒两种方式,交到机器人如何动作,控制器将过程记录下来,机器人根据记录周而复始地重复动作。 目前,大多数工业机器人都是按照后两种方式工作的。
0 [' |/ j( N6 i$ T* S2 A) H; w
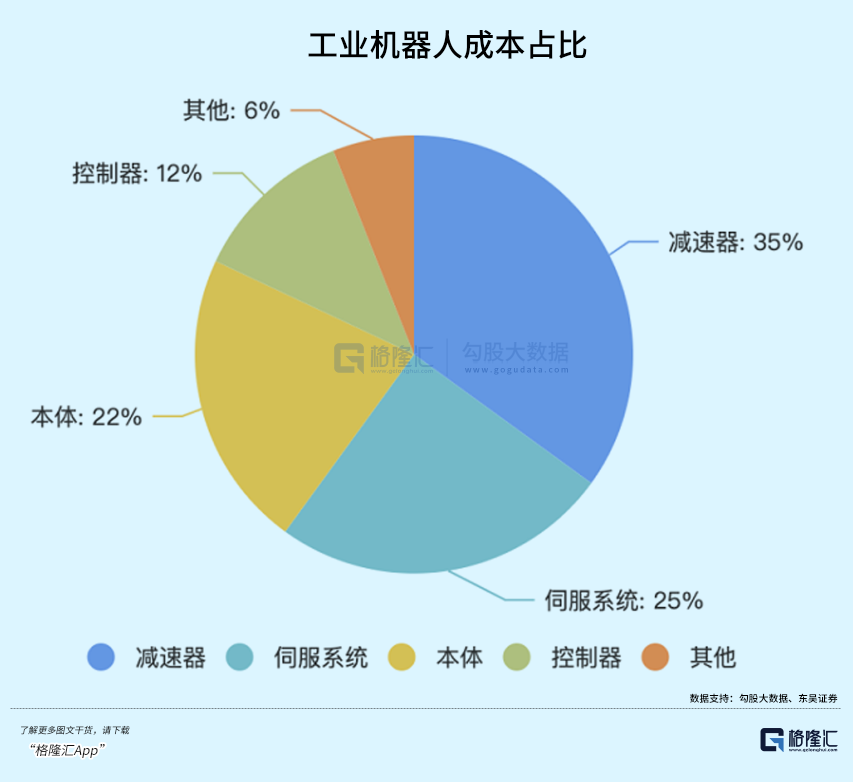
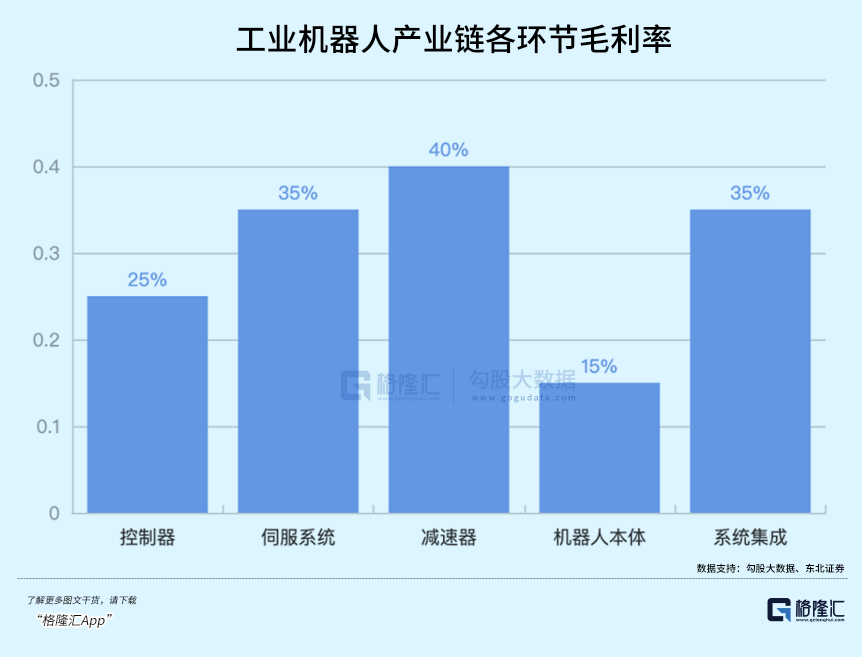
其核心零部件有三块,减速器、伺服电机和控制器,成本占比约70%。 这些上游核心零部件,都属于做出来容易,做好却难的产品——这是工业品与消费品的本质区别。 % m* ~5 W8 ?. ~5 d: K4 Z) U
4 n Z s0 t) `$ b- c/ t8 @
其中,减速器占比最大。但全球减速器市场,基本被日本哈默纳科和纳博特垄断。 ; s1 j/ m# F5 A
又分为RV减速器和谐波减速器。 0 W/ W( q- K3 k
RV减速机负载大、刚性强、结构复杂,价格当然也更贵,通常安装在机器人较大的关节处。目前主要生产企业为日本的纳博特,国内替代公司有两个,中大力德、双环传动。
; V# T7 X( u" E f
谐波减速机结构相对简单些,不过精密度更高,主要应用在灵活细小的关节处。两相比较,投资谐波减速机目前来说更有吸引力。 & O2 B4 l9 [# m/ p) _: u! ~ w* ]
1 T0 I5 J- A5 z, k) L
在工业机器人中,谐波减速器的成本占比为30%-35%,全球超过50%的份额在日本哈默纳科手中。 - j d' b( M S0 l3 \- E
不过,在近几年的追赶下,国内绿的谐波也占有20%-30%市场份额,A股中还有国贸股份也涉足此领域。 5 y+ ^+ n& R0 K4 M! i
再加之,目前减速器的市场供需缺口仍比较大,国产替代弯道超车的机会并不小。 ; f7 f2 ^3 g+ i3 Z. [4 m0 B& s
; S6 W* F3 A) h. ~
但无论如何,目前,国内生产工业机器人的厂家,除了少数几家真正掌握技术的公司,减速器可能买纳博,伺服可能买三洋,控制器可能买KEBA,获益自己制造的或许只有铸件。 ! {9 W% h5 v1 I4 r
铸件是不赚钱的。
, a/ \; ~5 \9 S/ ?, ]; Z3 V
- k! G u, \2 k8 Z+ R6 C% p! ^# E
简而言之,如果不把关键零部件国产化,生产工业机器人的企业,也就很难赚到钱。 | 
 发表于 2022-9-22 15:33:08
发表于 2022-9-22 15:33:08