|
|
如图,工件(类似于快餐盒)从A点输送到C点堆叠。工件在A点处于站立姿态,输送到C点还是站立姿态。 如此反复输送实现堆叠。C点有移动挡板,当第一个工件站立姿态输送过来靠住挡板,随着输送过来的工件越来越多,挡板自动后移。
* u# A2 g# D0 E 节拍100个每分钟。 初步设想轴1用电缸实现。 轴2和3用2个气缸配合实现。
8 M0 s" p7 N [$ F 现在难点在轴2和轴3的如何设计实现??
3 A! k. y; l; c% x- t F; U1. A点起始位置处,轴2和3必须伸出,夹住工件$ H; y: G0 P+ L' X" ?& F) j
2.接近终点的B点,轴2要伸出,轴3要部分收缩
( b0 p, b0 m0 E T0 O% P7 d7 a$ O3.终点C处。 轴3完全收缩,轴2仍然伸出
, ^: F8 A& B1 U3 J# a4 k5 L9 n+ T4. 离开终点C处,轴2收缩,然后回到起始位置 A点。) L& F3 z6 c1 s4 D" U R; ?
需要注意的是上述的2和3, 到达终点之前的某个点B点处,轴3就要收缩一部分,这样才能在到达终点的时候轴3才能来的及完全收缩,让轴2实现挤压堆叠功能。
; q8 ^1 e; }2 l% f! U 大家说说如何实现,谢谢了 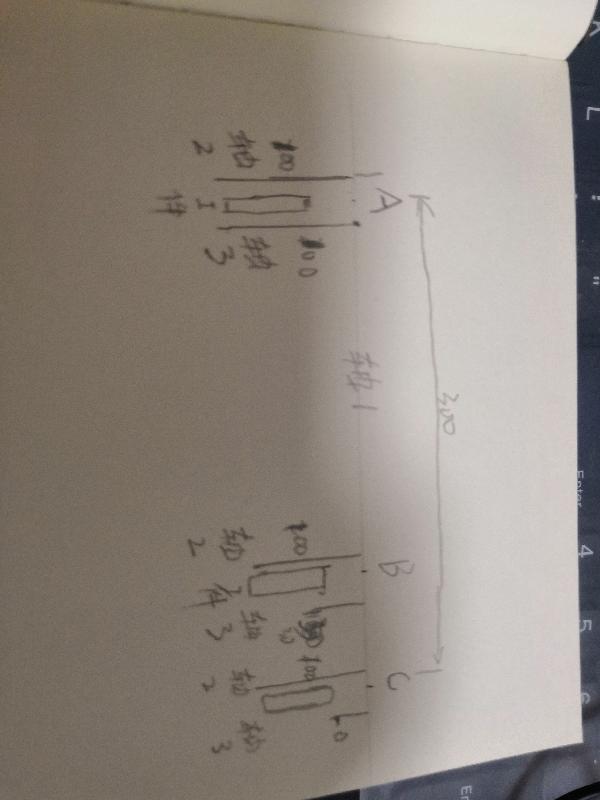 |
|

 发表于 2019-7-26 00:20:33
发表于 2019-7-26 00:20:33