|
如今制造业中难加工材料大量应用,其加工性能差与结构整体化带来的结构复杂化和高材料去除率,给薄壁复杂结构件加工带来了巨大挑战,对制造装备、工艺技术等也提出了更高要求。特别是大型弱刚性曲面结构件、薄壁回转体类零件、薄型多面体类等零件,在装夹技术方面亟待突破。 4 E% ] \9 b+ q. M- N+ U
一、薄壁零件加工的柔性工装设计航天类的薄壁复杂结构件具有弱刚性、形状结构相似等共性特征,同时型号种类呈现系列化发展特点,如舱体和端框类,舵面和翼面类等,这些零件的定位和夹紧规律性强。薄壁整体结构在切削加工中零件刚性随大量毛坯材料的去除而变化,结构刚性低且复杂,因而客观上要求加工中工件夹紧力要实时调整以适应零件整体动态刚度的变化;需要进行多点辅助支撑,以提高加工部位的局部刚度,减少薄壁变形。
( o8 s) Y! q Z1 Z: a
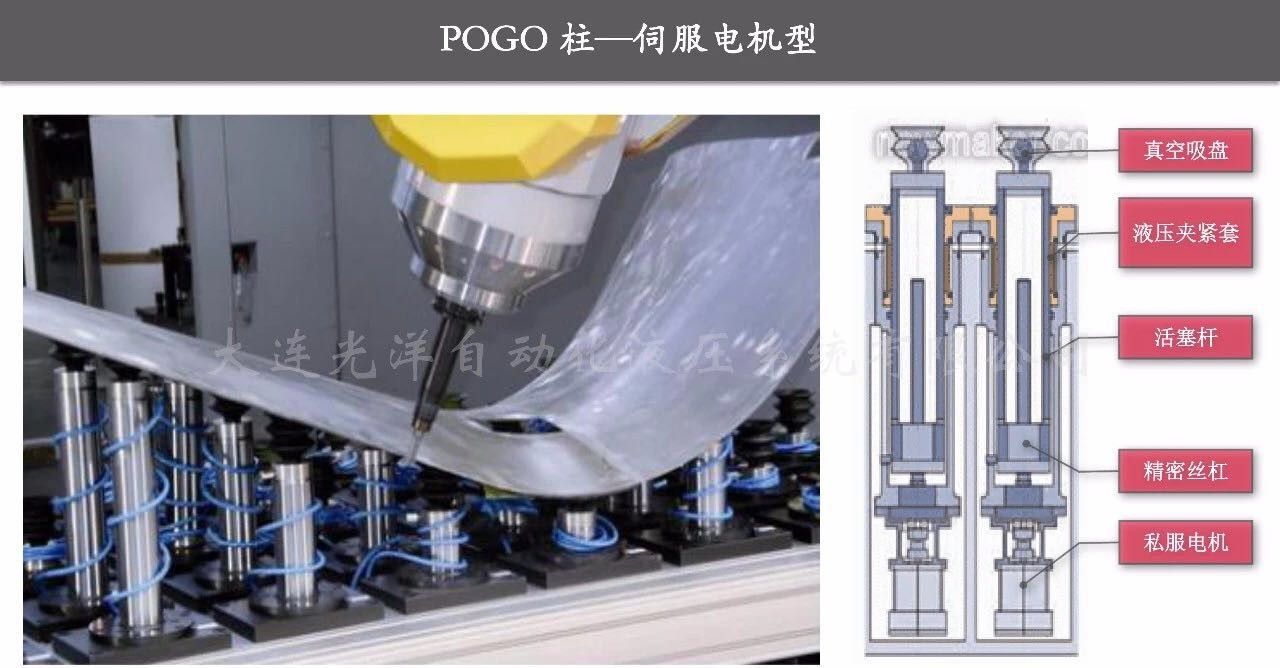
▲带传感器的柔性工装 ( R" ~# ?* l. }) z5 k U
综合体现机电液一体化技术和多传感器信息融合技术的柔性工装是近年来出现的先进装备技术,柔性工装的技术特点是定位和夹紧元件为通用元件,可互换性好;定位夹紧位置可自适应调整;夹紧力大小、方向和夹紧顺序可自动控制;驱动执行机构为机电液一体化部件;应用位移、力和压电传感器元件。
' u; b7 Q( y3 k& p7 O
柔性工装技术可以使一套夹具满足系列化多种尺寸规格的零件安装要求,既具有机械式可调夹具和组合夹具的柔性,又具有特种专用夹具的高效性,适用于数控加工设备,可以使高速数控加工机床的性能得到更加充分的发挥,大幅度降低辅助准备时间。 + h4 T, h8 r8 _! K! E2 }
二、大型曲面结构件加工方法
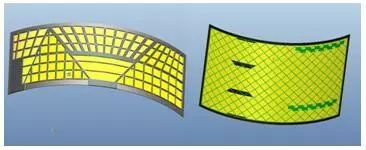
: i9 g/ n% u% a) | Y" D大型复杂铝合金贮箱网格壁板是焊接成为贮箱的基础零件,壁板按结构不同,又可分为壳段壁板和筒段壁板,不同型号的壳段壁板或筒段壁板结构又各不相同。根据设计要求,壁板在保持足够刚度和强度的前提下需尽量轻量化,所以其模型存在独特的结构特征。 , [8 r* \/ l) ^; |0 t" \1 C
▲壁板结构 ( ]% g( G F" H8 l" h4 {! I
壁板制造采用整块铝制板材辊弯后进行五轴铣削加工,整个加工工艺系统和加工过程具有区别于其他常规结构件加工的特点,这些特点主要包括:非规则蜂窝网格结构、凸台和口框等特征交错、整体相似与局部差异并存;宏观大尺寸与局部变刚性特征相结合;多应力耦合条件下的复杂转变规律,使得壁板发生宏观的翘曲变形以及不同网格位置的局部变形加大了不同网格壁厚的不均匀性。 9 ]6 c# Q) d6 {- i- N
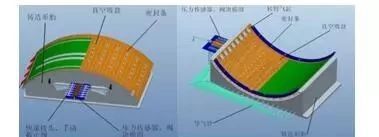
▲壁板真空吸附装置
: J7 s2 z, _4 _$ L
针对贮箱壁板高效高精加工需求,可以真空吸附装夹技术,通过真空吸附夹具吸附装夹零件,使其受到均匀分布载荷的夹紧力,从而减少零件因夹紧力造成的变形,提高零件的加工精度。真空吸附柔性装夹装置的主要组成包括:壁板内型面机铣加工大型真空吸附装置、外型面机铣加工大型真空吸附装置、真空发生系统、平台一体化控制系统。其中,真空吸附装置的主要组成包括铸造形胎、转臂气缸和真空吸盘、阀块模组、压力传感器、真空管路、快速接头、手动截止阀、密封条等组成。 p, Q+ D u: Z& I$ Y' \ |
真空发生系统的主要功能是提供持续、稳定的气压差,确保吸盘能够牢靠的吸住工件。真空发生系统的组成包括:真空泵、消音器、电磁压差真空阀、高真空隔膜阀、真空阱、高真空手动蝶阀、真空表、控制系统等,真空发生系统中重要的性能参数是其所能获得的极限真空度和对容器的有效抽速。
5 G+ F) _( G4 u9 e! w
三、薄壁回转体类零件加工
: x- }9 y5 W) U, O ?% K, r! Y3 I舱体、端框等结构件属于典型薄壁回转体类零件,这类结构件的数控铣削加工柔性工装可用于零件周向孔、槽、口框、型腔的铣削、钻削与镗削加工,而长度方向和直径方向的夹持范围均可在一定范围内调整,工装系统夹紧力范围也可调,从而适应多品种相似结构产品的装夹需求,其外圆车削夹具、内腔与端面车削夹具均具备软爪卡盘装夹功能,以适应薄壁结构的小变形装夹需求。 8 Q+ l. _9 s1 D
传统装夹条件下,薄壁回转体类零件多采用机械压板、闷盖的组合装夹方式,装夹时间长,装夹可靠性完全依靠工人态度和工作规范性,夹紧力大小和一致性无法保证。根据薄壁回转体类零件特征设计液压柔性工装系统,形成轴向夹紧位置可调,夹紧与浮动支撑结合,多点自动定心的柔性夹紧技术,从而满足不同直径和不同长度的回转体类零件夹紧需求。 - d9 i! \& u% w1 P' t) ^
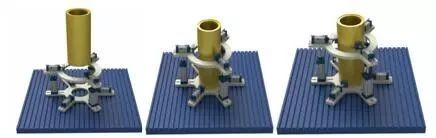
▲薄壁回转零件铣削加工柔性工装
8 l* I4 ~; p0 Q1 j1 Y
多类型号的舱体、端框等薄壁回转体类结构件均可采用同一套夹具装夹,柔性夹具的轴向行程径向行程均可以调整,轴向夹紧位置可以随舱体外形加工的位置而改变,解决加工干涉问题。通过液压站控制系统压力和夹紧力大小,采用有限元仿真分析不同夹紧力条件下,零件装夹变形情况,从而确定最优夹紧力。夹具底部采用360度转台,能够实现舱体等回转体类结构件不同位置的旋转和加工。
1 x& }0 V. T5 y9 |3 W
▲薄壁件外圆夹持示意 : }3 Q7 x4 v' {1 `
在舱体类零件的外圆与内腔加工中,六爪或八爪卡盘特别设计适于薄壁件和易变形工件的多点夹持。多爪卡盘基爪两两相连可浮动向心夹紧,这样使多个夹紧点的力方向皆指向中心,保证工件不易变形。同时,此种设计使得在卡盘上直接使用传统卡爪成为可能,并兼具离心力补偿。 . m, U% u3 B' S4 U/ o
四、薄型多面体类零件加工
2 I+ `* A. R: R3 T* R. x$ n薄型多面体类零件一般有较高的空气动力学要求,因此结构设计复杂,表面加工质量要求较高。这类结构件以多斜面为主,结构复杂,刃口部位局部最薄壁厚不足0.5mm,零件材料去除率达70%以上,典型零件对象包括舵面、翼面、罩板等。
4 O: [. E q ~7 t. g _
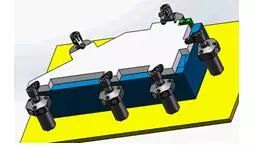
传统装夹模式下,针对薄型多面体类零件舵采用机械压板夹紧,装夹时间长,装夹可靠性完全依靠工人经验和工作规范性,夹紧力大小和一致性无法保证。根据薄型多面体类零件特征设计液压柔性工装系统,通过合理分布夹紧点,结合自动压紧和压紧力控制,形成适用于多种型号舵面、翼面类零件的柔性工装系统。 ! o( ~# {6 E5 Q3 ^8 ~
▲柔性工装示意图
' a+ Z6 @1 g0 X6 N1 y Y$ z9 t
舵翼类在加工过程中需要进行两面加工,因此需要设计两套柔性工装系统来分别完成正面和反面的加工,结构示意图如图5所示。以翼面零件为翼面零件毛坯正面夹紧采用六个液压转角下压油缸完成六个位置压紧,毛坯放置底座采用挖空设计,防止在零件加工时底座干涉。通过液压站控制系统压力控制六个夹紧点夹紧力大小,采用有限元仿真分析不同夹紧力条件下,零件装夹变形情况,确定最优夹紧力。
8 A! D P1 k8 X$ ^
在完成正面加工后,利用正面夹紧工艺搭子,反面夹紧采用六个液压转角下压油缸完成与正面相同的六个位置压紧,毛坯放置底座采用挖空设计,防止在零件加工时底座干涉。
+ f s" \# l* Q/ t | 
 发表于 2023-3-27 09:42:44
发表于 2023-3-27 09:42:44